МЫ СОЗДАЕМ И ПРОИЗВОДИМ
ЭЛЕКТРОННЫЕ НАБОРЫ И МОДУЛИ !










")

")
Описание товара
Подробное описание товара
Бампер с девятью датчиками линии из экосистемы Roborace позволит вашему роботу определять траекторию езды по дороге и детектировать обрывы с трассы. На бампере расположено девять сенсоров, каждый из которых способен отличить все оттенки серого — от белого до чёрного. В результате ваш робот будет лучше держать траекторию и мчаться по чёрной или белой линии на контрастном фоне, не теряя скорости.

Видеообзор
Предыдущие версии
Бампер Roborace с девятью сенсорами линии v2 пришёл на замену v1. Во второй версии мы внесли ряд важных улучшений:
- Заменили устаревшие оптопары TCRT5000 на более точные ITR8307, что улучшило плавность движения по линии.
- Обновили микроконтроллер STM32F030F4P6 на более новую версию STM32G030F6P6, что повысило скорость сбора данных.
- Усовершенствовали алгоритм считывания: ранее все девять оптопар одновременно излучали ИК-свет, что могло вызывать взаимные помехи. Теперь оптопары активируются поочерёдно, что исключает засветку соседних каналов и повышает точность измерений.
Подробности
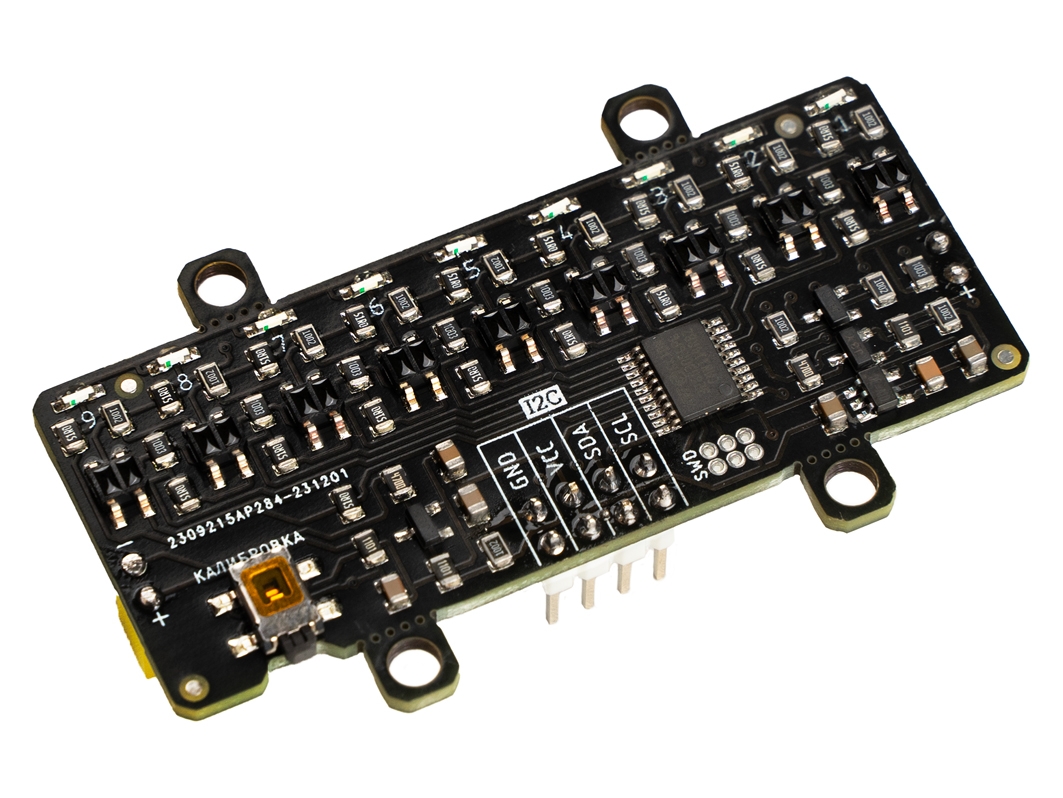
Рассмотрим основные компоненты и плюшки бампера Roborace:

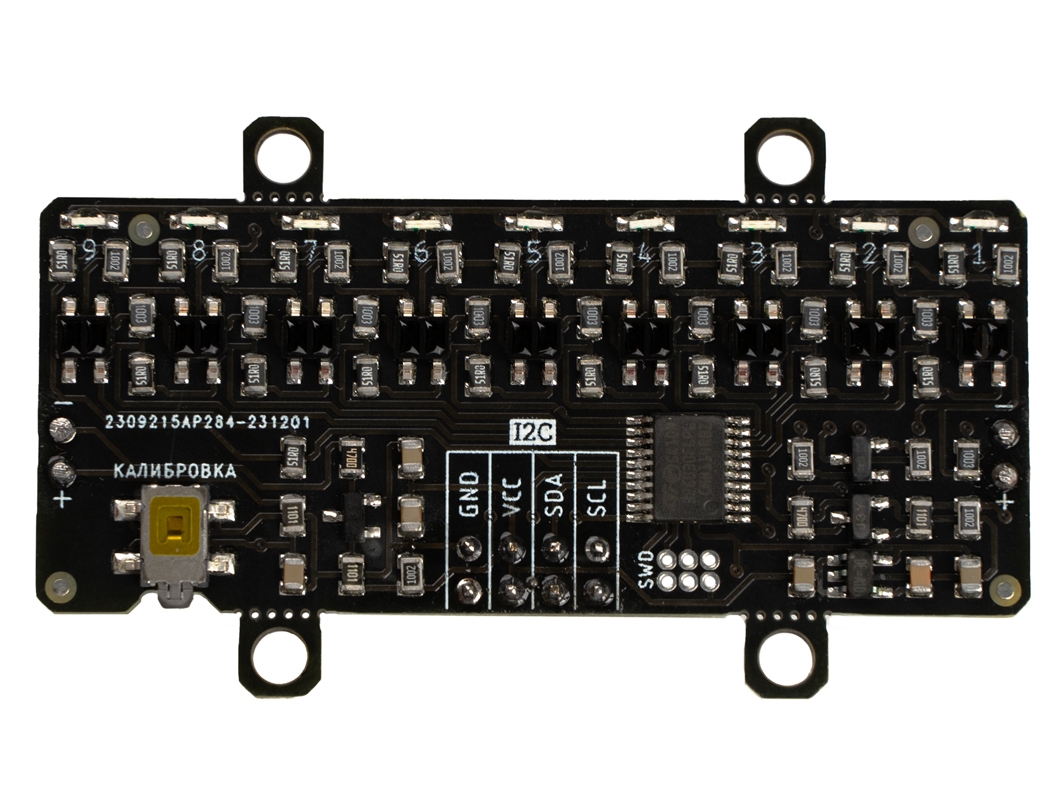
Датчики линии
Для детектирования трассы на модуле расположено девять датчиков линии на оптопаре ITR8307. Каждая оптопара состоит из двух элементов — ИК светодиода и фототранзистора. Светодиод испускает ИК-излучение, которое отражается от поверхности и улавливается фототранзистором. Темный цвет отражает меньше света, светлый — больше.
Каждый канал активируется поочередно и сопровождается световой индикацией на соответствующей линии.
Микроконтроллер STM32G030F6P6
Мозгом бампера выступает микроконтроллер STM32G030F6P6 на базе вычислительного ядра ARM Cortex-M0. Контроллер опрашивает по очереди девять датчиков и передаёт данные управляющей платформе по интерфейсу I²C.
Кнопка калибровка
Калибровка позволяет модулю различать линию трассы и фон. Для удобства процесса без лишних строк кода мы предусмотрели аппаратную калибровку с помощью кнопки, которая выполняется в два этапа:
- Измерение уровня отражённого света от поверхности трассы.
- Измерение уровня отражённого света от поверхности фона.
Полученные значения сохраняются во встроенной энергонезависимой памяти, благодаря чему модуль сохраняет способность различать линию и фон даже после выключения питания.
Контакты подключения
Бампер Roborace подключается к управляющей электронике через четыре контакта PLS.
| Контакт | Функция | Подключение |
|---|---|---|
| GND | Земля | Подключите к земле микроконтроллера. |
| VCC | Питание | Подключите к питанию микроконтроллера. |
| SDA | Линия данных шины I²C. | Подключите к пину SDA микроконтроллера. |
| SCL | Линия тактирования шины I²C. | Подключите к пину SCL микроконтроллера. |
Все остальные подробности технической начинки читайте в наших статьях на вики для Arduino и Raspberry Pi. А для разработчиков мы приготовили технический Datasheet, где описаны регистры, протокол и другие особенности для работы с модулем.
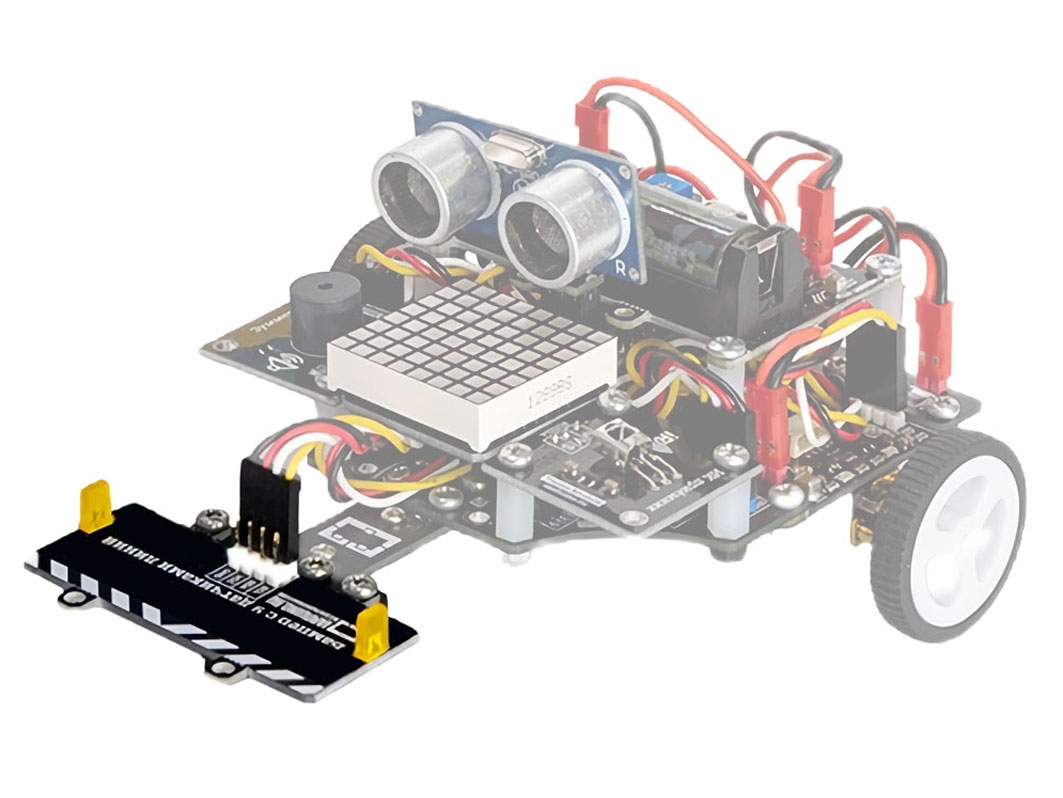
Подключение и программирование
Для старта необходимо:
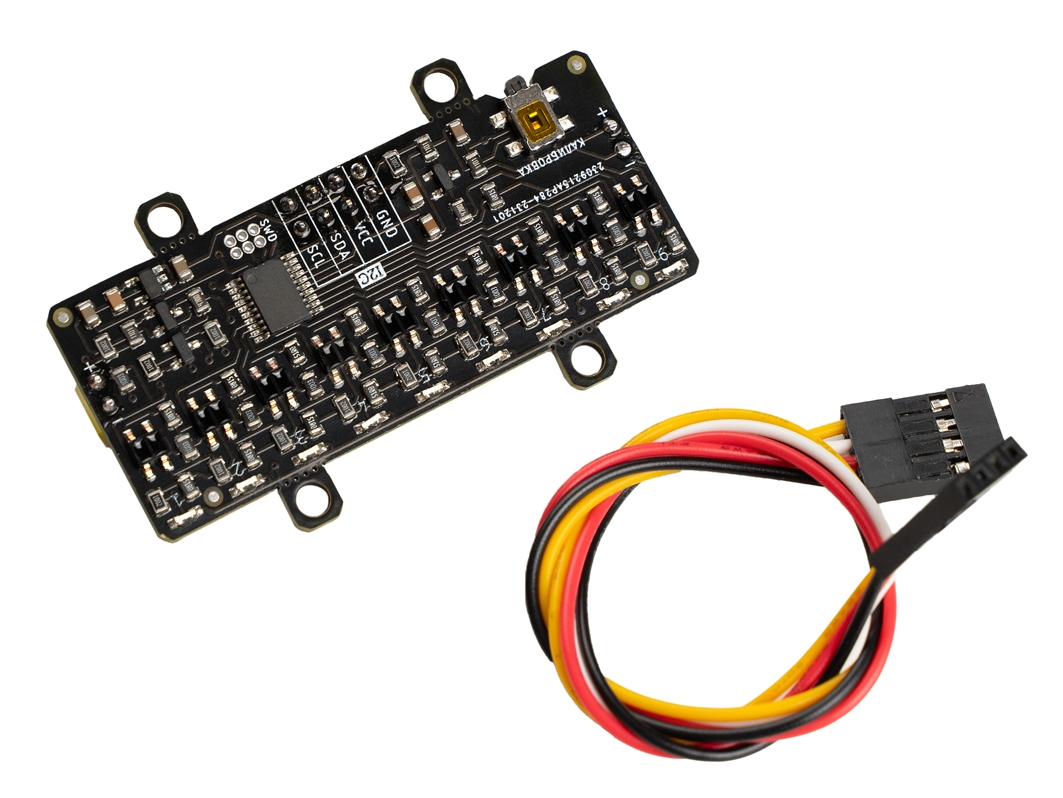
- Подключить бампер Roborace к управляющей плате с помощью шлейфа «мама-мама» (4 pin) из комплекта.
- Написать программный код для считывания сигналов с модуля.
Бампер Roborace относится к линейке FLASH-I2C, а значит к одной линии можно подключить более 100 модулей. Адрес по умолчанию на шине I²C установлен 0x09, который можно изменять программно.
Все подробности по подключению, настройке и программированию бампера Roborace читайте в наших статьях на вики для Arduino и Raspberry Pi. А для разработчиков мы приготовили технический Datasheet, где описаны регистры, протокол и другие особенности для работы с модулем.
Подробности про Roborace
В современном мире умной робомашинкой никого не удивишь. Мы же пошли дальше и создали экосистему Roborace, в которой вы сами творец автомобиля и его тюнинга.
В центре системы базовая плата основания на выбор: Roborace или Roborace MiniQ. Для минимального старта к выбранной робоплатформе понадобится добавить базовый сет компонентов:
- Arduino Nano в качестве мозга системы.
- Модуль питания в роли аккумулятора автомобиля.
- Пару моторов с колёсами для придачи машинки в движения.
- Шаровая опора для балансирования робоплатформы.
Однако это только вершина айсберга, добавьте к машинке:
- Дальномер HC-SR04 для определения расстояние до препятствия.
- Бампер с датчиками линий для определения езды по дороге и детектирования обрыва.
- Датчик касания для фиксации препятствий путём физического контакта.
- Поворотные колёса для задания поворотов влево и вправо.
- Задние колёса с дифференциалом для прохождения поворотов с одинаковым усилием.
- Светодиодную матрицу для индикации событий.
- И многое другое.
Возможности тюнинга в машинке Roborace ограничены лишь вашим воображениям.

Однако мы рекомендуем взять готовый набор Roborace, где мы всё собрали в одной коробке с увлекательной инструкцией по сборке и обучению программированию.

Всё это поможет вам создать свою собственную уникальную робомашинку, которая будет работать конкретно по вашей идеи и алгоритму.
Доступные альтернативы
В данном бампере Roborace расположено 9 датчиков линий с шагом 7 мм. В нашем магазине есть различные модификации бамперов Roborace:
- Бампер Roborace с 9 датчиками линии v2 (Шаг 7 мм / FLASH-I2C)
- Бампер Roborace с 9 датчиками линии (Шаг 14 мм / FLASH-I2C)
Комплектация
- 1× Бампер Roborace с 9 датчиками линии v2 (Шаг 7 мм / FLASH-I2C)
- 1× Шлейф «мама-мама» (4 pin)
Габаритный чертёж

Характеристики
- Модель: Бампер Roborace с 9 датчиками линии v2 (Шаг 7 мм / FLASH-I2C)
- Совместимость: платформы Roborace и другие контроллеры
- Чип: микроконтроллер STM32G030F6P6
- Датчики линии: оптопары ITR8307
- Количество оптопар: 9
- Детектируемое расстояние: 2–50 мм
- Напряжение питания Vcc: 3,3–5 В
- Напряжение логических уровней: 3,3–5 В
- Аппаратный интерфейс: контакты PLS
- Программный интерфейс: I²C
- I²C-адрес: 0x09 (по умолчанию)
Ресурсы
Мы также рекомендуем к чтению ссылки на статьи, документации и другие вспомогательные материалы по платформе Roborace.
Инструкции
- Введение в платформу Roborace
- Руководство по использованию бампера Roborace для Arduino
- Руководство по использованию бампера Roborace для Raspberry Pi
- Технический Datasheet по использованию бампера Roborace
Магазин
- Образовательный набор Roborace
- Ультразвуковой дальномер Roborace HC-SR04
- Датчик касания Roborace
- Бампер с датчиками линии (Узкий)
- Бампер с датчиками линии (Широкий)
- Поворотные колёса Roborace (Узкая колея)
- Поворотные колёса Roborace (Штатная колея)
- Задние колёса с дифференциалом Roborace
- Комплект знаков для домашнего курса Roborace
Библиотеки
- Библиотека для Arduino «iarduino_I2C_Bumper»
- Как установить библиотеки для Arduino
- Расширенные возможности библиотек для Arduino на шине I²C
- Общие особенности модулей линейки FLASH-I2C